



Örnek Proje 9 - Üçgen Çizelim

Giriş
iDeaSim Senaryo 5'te öncelikle ortamımızı oluşturmamız gerekiyor. Bunun için Ortam menüsünden 3 adet hedef noktayı masanın üzerine yerleştireceğiz. Daha sonra robotumuzun ileri sürme ve olduğu yerde dönme hızlarına uygun olarak üçgeni takip edecek algoritmayı oluşturacağız.
Amacı
iDeaSim Senaryo 5'i kullanarak üç hedef nokta belirleyeceğiz. Bu noktalar bir eşkenar üçgenin köşeleri olacak. Amacımız daha sonra robot üzerinde gerçek denemeleri yapmadan önce algoritmamızın doğruluğunu simülatörde denemek.
Yöntem
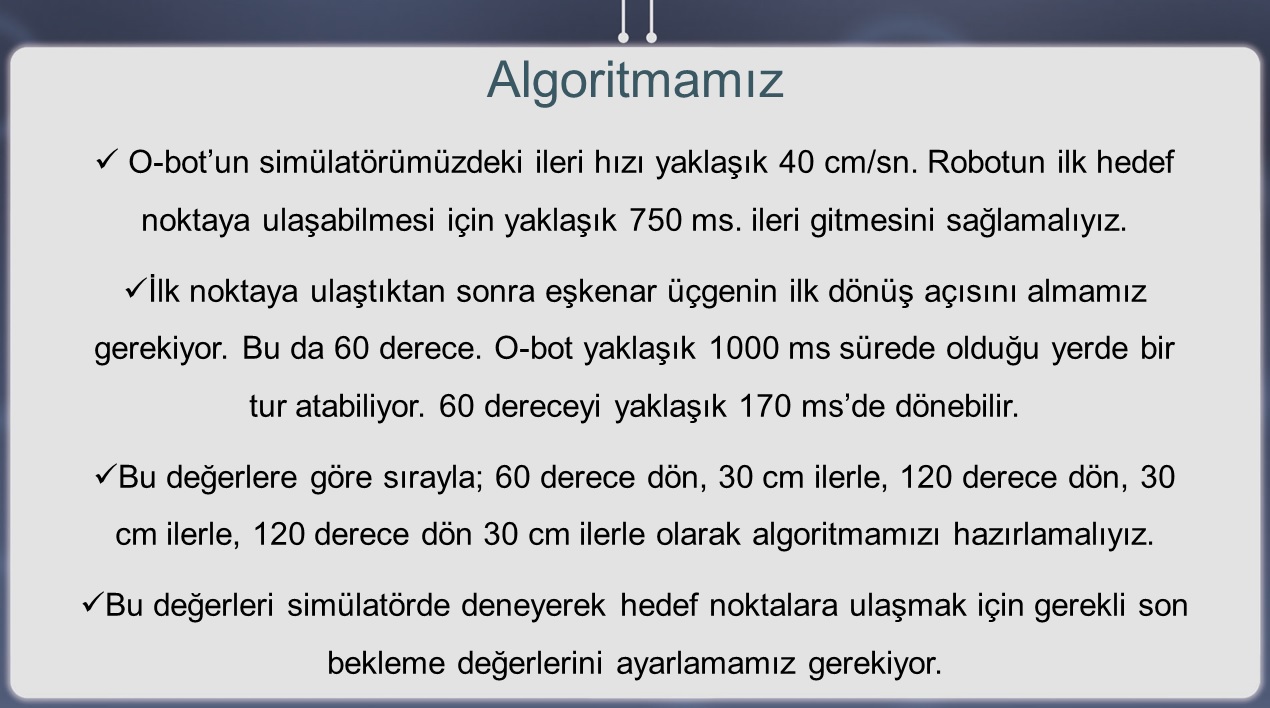
Hedef noktaları robotun 30 cm. önünden başlayacak şekilde belirledik. Eşkenar üçgenimizin kenar ölçüleri 30 cm. olacak şekilde hedef noktaları masa üzerine yerleştirdik. Daha sonra O-bot'un bu hedef noktalara ulaşması için ileri sürme ve olduğu yerde dönme hızlarını kullanarak hareket adımlarını belirledik. Algoritmamızı aşağıdaki gibi oluşturduk.
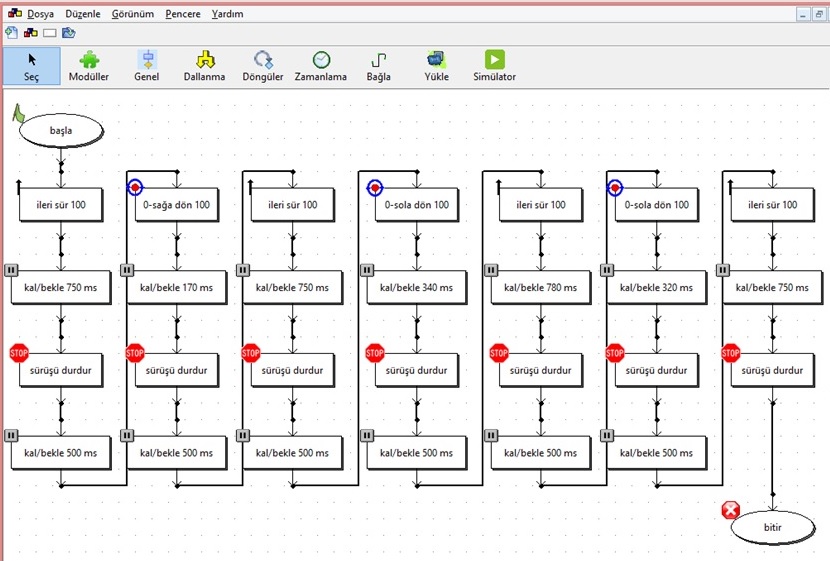
Bu algoritmamızın iDea'daki uygulamasını da yine aşağıdaki gibi yaptık.
Sonuç ve Tartışma
Bu projemizde öncelikle iDeaSim Senaryo 5'te kendi belirlediğimiz ortamı oluşturduk. Bu ortama bir eşkenar üçgen oluşturacak şekilde hedef noktalar ekledik. Bu noktalara gidecek şekilde O-bot'un simülatörde ilerleme ve dönme sürelerini belirledik.
iDeaSim'de de gerçek robotta olduğu gibi dönüş hızı ve süreye bağlı olarak robotun hareketlerinde kaymalar oluşuyor. Bunu düzeltmek için birkaç deneme yaparak ortalama aldık ve hedef noktalara uğrayacak şekilde bekleme sürelerini değiştirdik. Robotumuzun algoritmasını doğruladık ve gerçek robot ile denemelere başlamaya hazır duruma geldik.
Kaynaklar
www.bilimgenc.tubitak.gov.tr
Ekip Tanıtımı