

Örnek Proje 13 - Otomatik park edelim!

Bu projemizde O-bot'u bulunduğu yerden park noktasına götüreceğiz. Uygulamamızı iDeaSim Senaryo 8'de deneyeceğiz.
Giriş
Robotumuzun altında bir adet çizgi algılayıcı bulunuyor. Senaryoya çizgiler ekleyip bu çizgilerden faydalanarak robotumuzu park alanına yönlendireceğiz. Robotun engellere çarpmasını engelleyecek bir algoritma hazırlayacağız.
Amacı
Robotumuzun park noktası ile işaretlenmiş yere park çizgisini geçmeyecek şekilde park etmesini sağlayacağız.
Yöntem
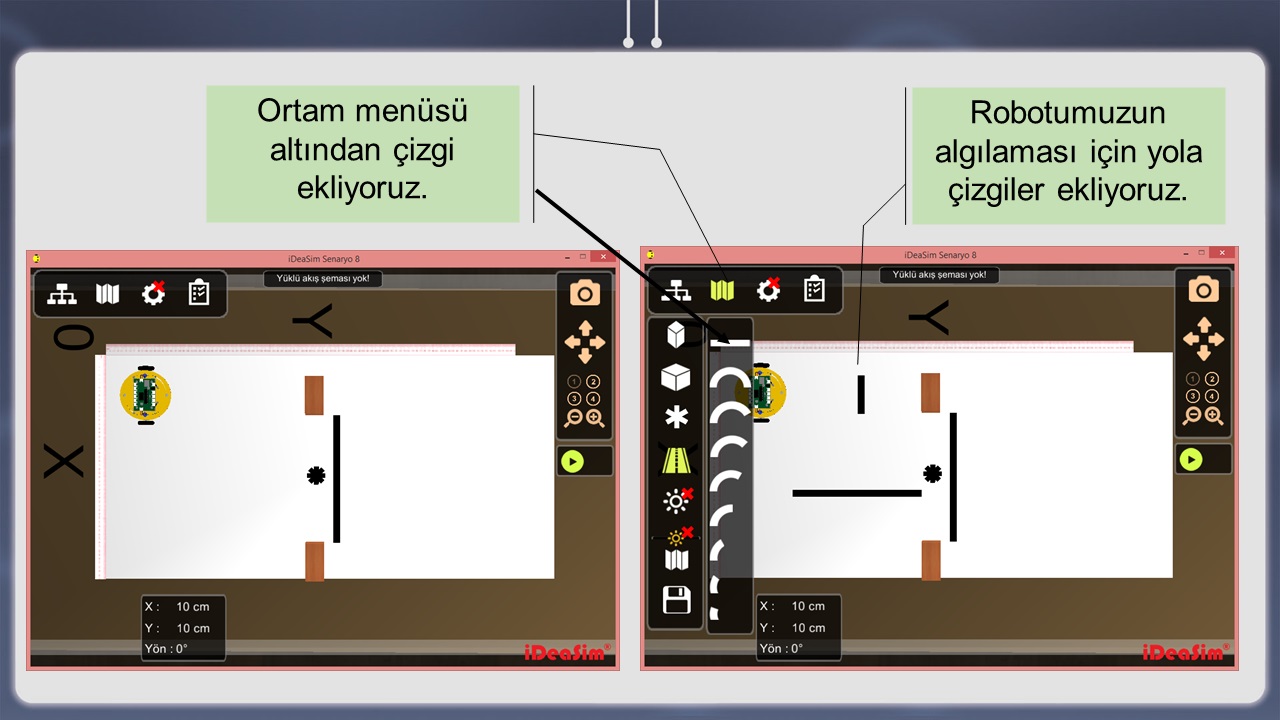
iDeaSim'de ortam hazırlama menüsünü kullanarak robotun yürüdüğü zemin üzerine çeşitli çizgiler ekledik. Bu çizgileri robotumuza komutlar vermek için yardımcı olarak kullandık. oluşturduğumuz yeni senaryo ekranı aşağıdaki gibi:
Algoritmamızı şöyle kurguladık:
- ilk çizgiyi görene kadar robotumuz ileri gitsin,
- çizgiye ulaşınca saat yönünde 90 derece dönsün ve ileri gitmeye başlasın,
- ikinci çizgiyi görünce olduğu yerde saatin ters yönünde 90 derece dönsün ve ileri gitsin,
- çizgiyi görünce dursun.
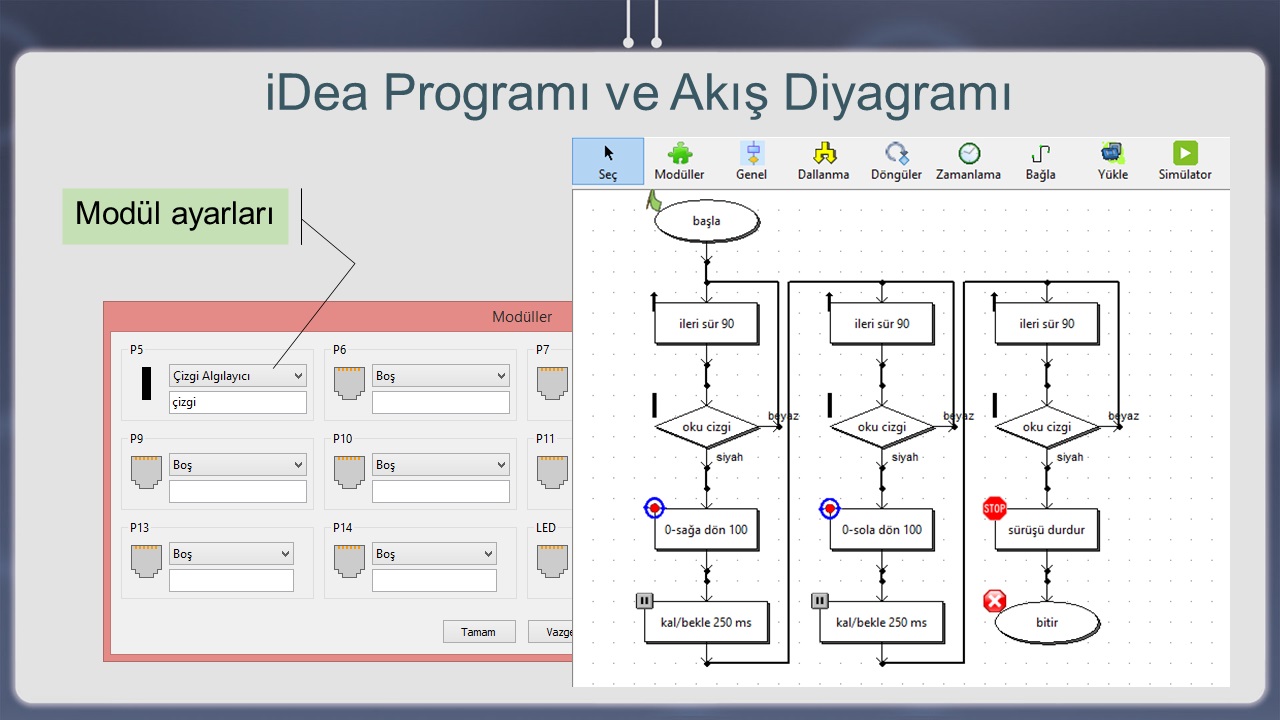
Projemizin algoritması ve modül ayarlarını şöyle yaptık:
Sonuç ve Tartışma
Bu projede O-bot'u otomatik olarak istediğimiz bir noktaya park ettirdik. Bunun için robotun hareket ettiği yüzey üzerine siyah bant çizgi ile robotun dönüş yapmasını istediğimiz yerleri işaretledik.
Robotumuzun bu çizgiyi görebilmesi için bir çizgi algılayıcı ekledik. Algoritmamız ile çizgi görüldüğünde yön değiştirmesini ve son çizgiye varıldığında durmasını sağladık.
Algılayıcı kullanıldığında robotu yönlendirmenin kolaylaştığını gözlemledik.
Kaynaklar
www.bilimgenc.tubitak.gov.tr
Ekip Tanıtımı