

Örnek Proje 16 - Akıllı park edelim!
Giriş
Robotumuzda bir engel algılayıcı ve bir çizgi algılayıcı bulunuyor. Engellere çarpmadan istediğimiz noktaya ilerlemek için yola çizgi ekleyerek robotumuzu akıllı bir şekilde park noktasına yönlendireceğiz.
Amacı
Robotumuzun park yerine akıllı bir şekilde park etmesini sağlamak.
Yöntem
Senaryo ekranımızı ortam menüsünü kullanarak aşağıdaki gibi düzenledik.

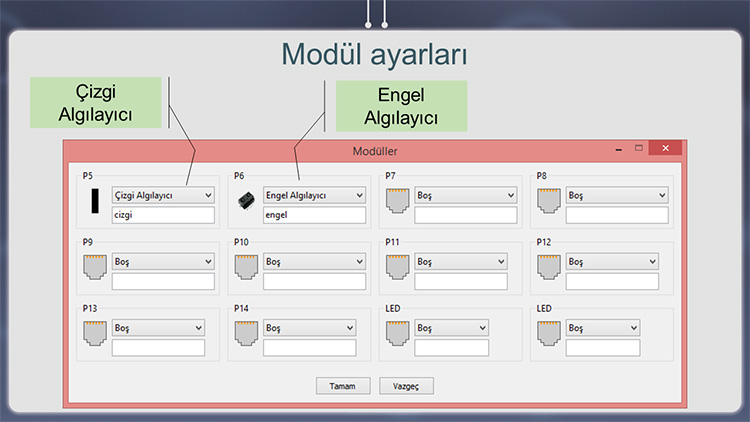
iDea'da modül ayarlarımızı çizgi algılayıcı ve engel algılayıcı olacak şekilde düzenledik:
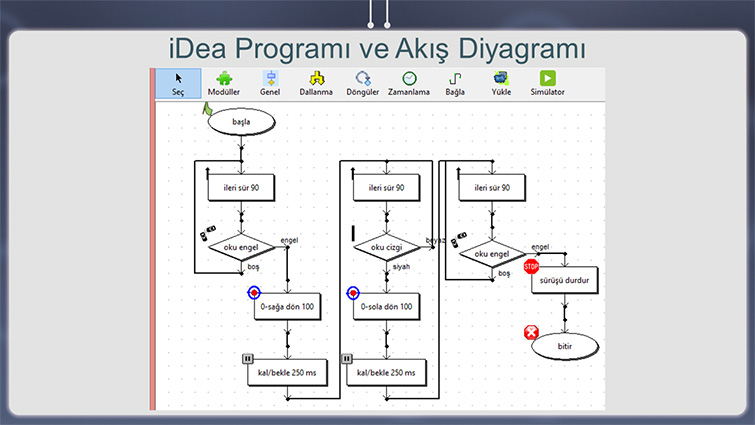
iDea akış diyagramını aşağıdaki gibi düzenledik:
Sonuç ve Tartışma
Bu projede engellere çarpmadan akıllı park edebilen bir robot algoritması geliştirdik. Bunun için robotumuzun önündeki engel algılayıcıyı ve altındaki çizgi algılayıcı kullandık.
Robotumuz ilk engeli gördüğünde 90 derece saat yönünde dönüp yere koyduğumuz çizgiye kadar ilerledi. Bu çizgiye varınca bu sefer saat yönünün tersine 90 derece dönüp bir sonraki engeli görene kadar düz gitti. Robotumuzun akıllı bir şekilde tam istediğimiz noktaya park etmesini sağlamış olduk.
Kaynaklar
www.bilimgenc.tubitak.gov.tr
Ekip Tanıtımı