Örnek Proje 6 - Hedefe Ulaş
•
18/05/2015
Bu projemizde O-bot’umuzu belirlenen hedef noktalara ulaştıracağız. Uygulamamızı iDeaSim-senaryo 4’te deneyeceğiz.
Giriş
- O-bot’un hızı yaklaşık 50 cm/sn. Bunun için 1 sn ileri gitmesini sağlamalıyız.
- O-bot yaklaşık 250 ms sürede olduğu yerde çeyrek tur atabiliyor.
- Bu değerleri robot üzerinde deneyerek hedef noktalara ulaşmak için gerekli son bekleme değerlerini ayarlamamız gerekiyor.
Amacı
iDea’nın robot seti veya motor komutlarını kullanarak O-bot’u önceden belirlenmiş noktalara götüreceğiz. Görevimiz sırasıyla;
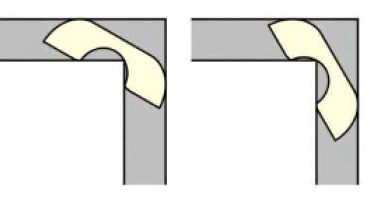
1. Robotumuzdan 40cm ileride bulunan ilk noktaya ulaşmak,
2. Robotumuzu olduğu yerde ve saat yönünde çeyrek tur (90 derece) döndürmek,
3. Bulunduğu yerden 30cm ilerideki son hedef noktaya varmak.
Soru: Eğer ilk noktaya uğramadan hedef noktaya varmak istersek farklı bir çözüm bulabilir miydik? Eğer yapabilirsen videonu Bilim Genç’te mutlaka paylaşmalısın!

Sonuç ve Tartışma
Proje sonucunda çektiğimiz fotoğraf ve videoları paylaşalımKaynaklar
www.bilimgenc.tubitak.gov.tr
Ekip Tanıtımı
Proje ekibinin toplu çekilmiş fotoğrafını buraya koymalısın.