




Yapay Deriye Sahip Robotlar Artık Hissedebiliyor
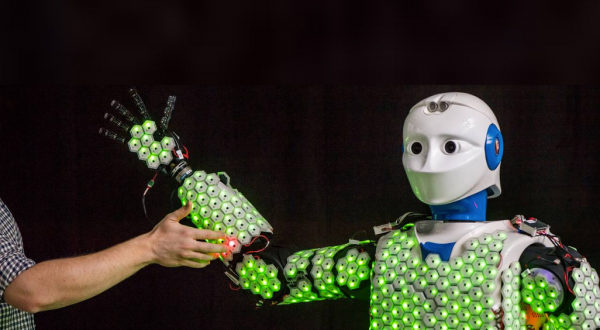
İnsan derisinden ilham alan Münih Teknik Üniversitesinden araştırmacılar yapay deriye sahip insansı bir robot geliştirdi. Geliştirilen yapay deri sayesinde robot insan dokunuşlarını hissedebiliyor.
Günümüzde robotlar insanların yaptığı birçok işi yapabiliyor. Dış görünüş olarak insanlara benzeyen robotlar insansı robot olarak isimlendiriliyor. Gelecekte insansı robotların insan vücudunun gerçekleştirdiğine benzer işlevleri gerçekleştirmesi bekleniyor.
İnsansı robotların insanlar gibi çevreleri ile etkileşim hâlinde olabilmesi için çevrelerini hassas bir şekilde algılayabilmesi gerekiyor. Münih Teknik Üniversitesinden Prof. Gordon Cheng ve arkadaşları bu amaçla robotlarda kullanılabilecek yapay bir deri geliştirdi. Yapay deri, çapı yaklaşık 2,5 cm olan altıgen şekilli sensör birimlerinden oluşuyor. Bu sensörler sıcaklığı, basıncı, mesafeyi ve ivmelenmeyi tespit edebiliyor.

Technical University of Munich (TUM)
İnsan derisinde yaklaşık beş milyon algılayıcı hücre var. Yapay bir deriye bu kadar yüksek sayıda sensör yerleştirildiğinde bu sensörlerden gelen verilerin işlenebilmesi için çok büyük bilgisayar sistemlerine ihtiyaç duyuluyor. Yeni araştırmada bilim insanları bu sorunun üstesinden gelebilmek için daha önce geliştirilen yapay deri sistemlerindekinden farklı bir yöntem kullandı.
Technical University of Munich (TUM)
Bu yöntemde yapay derideki bütün sensörlerden gelen sinyaller analiz edilmiyor. Bunun yerine sadece sinyalinde değişim olan yani aktif hâle gelen sensörlerden elde edilen veriler işleniyor.
Araştırmacılar geliştirdikleri yapay deriyi H-1 isimli insansı robota yerleştirdi. Robotun gövdesinde, kollarında, bacaklarında hatta ayaklarının altında toplam 13.000’den fazla sensör var. Bu sayede robot bütün “vücuduyla hissedebiliyor”. Örneğin pürüzlü bir zeminde dengeli bir şekilde yürüyebiliyor, bir insana sarılabiliyor ya da elini sıkabiliyor.
Geliştirilen teknoloji, robotların insanlarla ve çevreleriyle güvenli bir şekilde etkileşim kurmasına yardımcı olabilir.









