


Tinkercad’de Arduino ile Robot El Yapalım: Flex Sensör ve Servo Motor Kontrolü
Tasarla ve Yap köşesinin bu kodlama projesinde Arduino kartı Tinkercad internet sitesi üzerinden kodlayarak, bir robot eli hareket ettirmek için kullanacağımız flex sensor ve servo motoru nasıl kontrol edebileceğimizi öğreniyoruz.

Bilmekte Fayda Var!
Robot eller, uzuvlarını kaybeden insanların el işlevlerini yerine getirmek ya da insanların zarar görebileceği tehlikeli görevleri uzaktan gerçekleştirmek için kullanılabilir. Robot eller Arduino kart ile kontrol edilebilir. Bunun için flex sensörler kullanılarak parmakların bükülme açıları tespit edilir. Tespit edilen bükülme açılarına göre servo motorlar yardımıyla robot el hareket ettirilebilir.
Flex sensör, esneklik sensörüdür. Temelde bir dirençtir. Şerit hâlinde bulunur ve büküldüğünde sensörün direnç değeri değişir. Bu direnç değerini okuyarak bükülme açısını tespit edebiliriz.
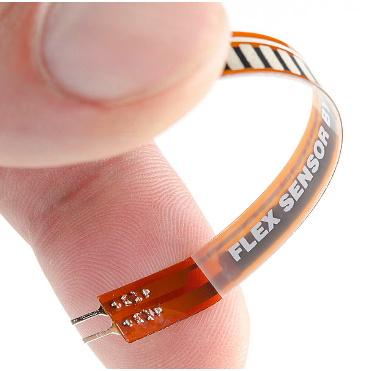
SparkFun Electronics CC BY 2.0
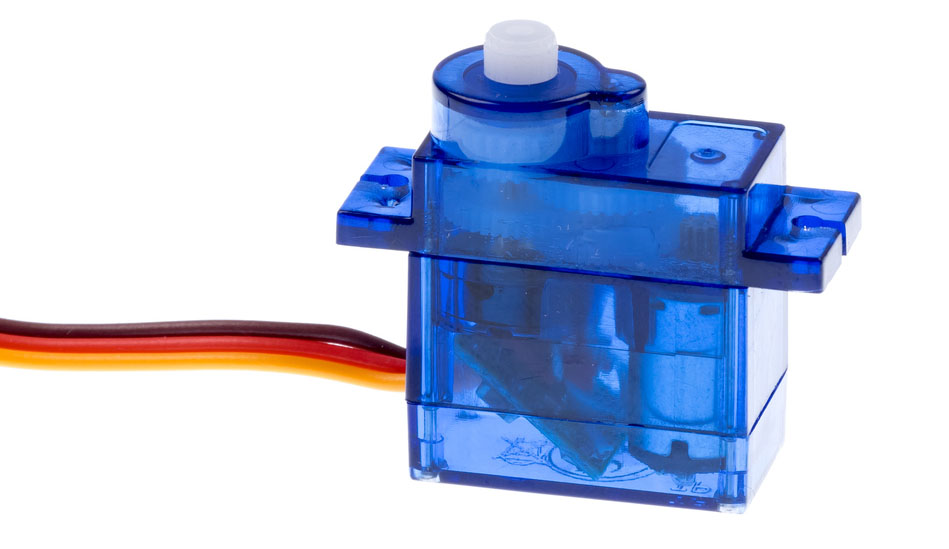
Tespit edilen direnç değerine bağlı olarak servo motorlara bağlı ipleri çekip, bırakarak robot eldeki parmakları hareket ettirebiliriz.
Nelere İhtiyacımız Var?
- İnternet bağlantısı olan bilgisayar
Ne Yapıyoruz?
Arduino ile robot eli kontrol etmek için flex sensördeki değerleri nasıl okuyabileceğimizi ve okuduğumuz değerlere göre servo motoru nasıl kontrol edebileceğimizi aşağıdaki videoyu izleyerek öğrenebiliriz.
Ne Oldu?
Bu kodlama projesinde Tinkercad internet sitesi üzerindeki flex sensörün Arduino’ya nasıl bağlanacağını öğrendik. Bağlantıyı yaptıktan sonra sensör değerlerini nasıl okuyabileceğimizi gördük. Ölçtüğümüz değeri servo motorda kullanmak için 0 ile 180 arasına eşitledik ve servo motoru buna göre döndürdük. Sonuçta flex sensör büküldükçe servo moturun hareket ettiğini gördük.
Kaynak:
- Temel Düzey Robotik Kodlama Eğitimi (E-Kitap), Millî Eğitim Bakanlığı Öğretmen Yetiştirme Genel Müdürlüğü, 2020.