



Acemi Şoföre Yardımcı Park Sistemi
•
01/06/2015
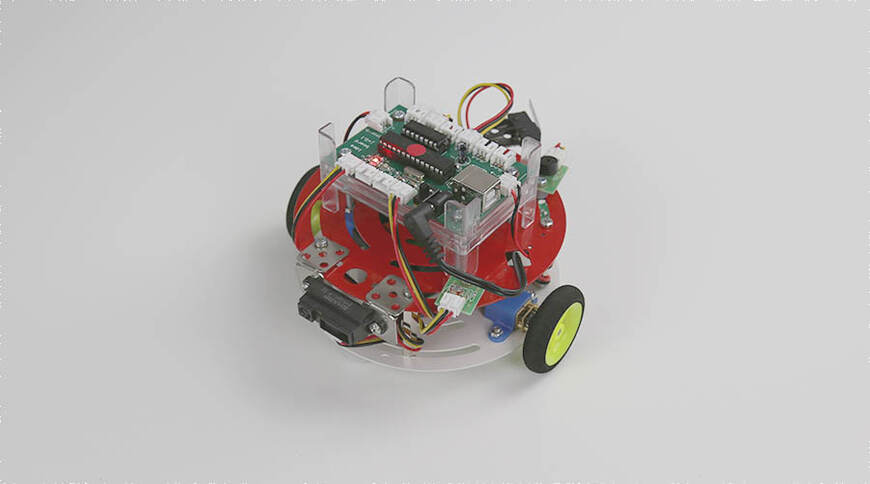
Robot üzerindeki mesafe algılayıcıyı kullanarak robotun sorunsuz park etmesini sağladık.
Giriş
O-bot’un üzerindeki mesafe algılayıcısını oluşturduğumuz akış şemasıyla araba arasına park edilmesinde kullandık.
Amacı
İki araba arasına park etmekte zorlanan araba kullanıcılarına, park etmede yardımcı olmak
Yöntem
Mesafe sensörünü kullanarak ve algoritma oluşturarak iki engel arasında o-bot’un park etmesini sağladık.
Sonuç ve Tartışma
Oluşturduğumuz algoritma robotumuz üzerinde sorunsuz çalıştı ve robotumuz engellere çarpmadan park etti.
Kaynaklar
bilimgenc.tubitak.gov.tr
Ekip Tanıtımı
Nesibe Hilal Karagöz
Hatice Zehra Yazlı









