



Araç Takip Sistemi
Trafikte birbirini algılayan ve çarpmayan arabalar.
Giriş
Trafik kazalarının çoğu sürücü hatalarından ve aşırı hızdan kaynaklanmakta. Bu projemizde araçların birbirlerini algılamasını sağlayan bir sistem tasarladık böylece araçlar birbirlerine yaklaştıklarında hızlarını düşürdüler ve kaza yapmadılar.
Amacı
Robotların önlerindeki diğer robotu algılayarak hızlarını düşürmesini sağlamak.
Yöntem

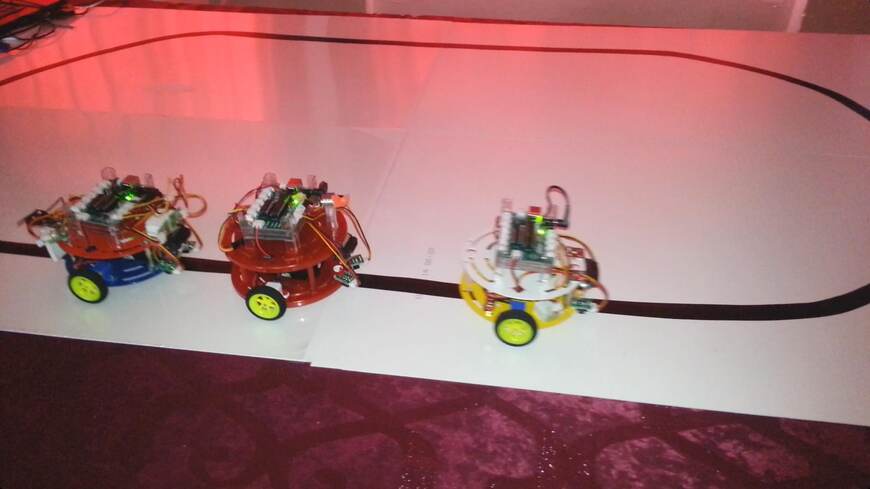
Araçların birbirine çarpmaması için mesafe algılayıcıları kullandık böylece birden fazla hız seçeneği ile araçlar biribirlerine yaklaştıklarında hızlarını düşürdüler.
Sonuç ve Tartışma
Robotlar mesafe algılayıcılarına tanımlanan iki farklı hız seçeneğini kullanarak birbirlerine çarpmadılar. Sistem yine mesafe algılayıcılarına tanımlanacak çeşitli sayıdaki hız seçenekleriyle daha etkili çalışabilir viraj kasis gibi engeller de aynı şekilde hız değişimleriyle daha emniyetli geçilebilir. Aynı sistem uzun araç konvoylarının trafikte daha hızlı ilerlemesi için de kullanılabilir.
Kaynaklar
http://www.bilimgenc.tubitak.gov.tr/
Ekip Tanıtımı
PROJE EKİBİMİZ:
Berke ŞİMŞEK
Efe TOPCUOĞLU









