



Bir Engeli Takip Eden Robot
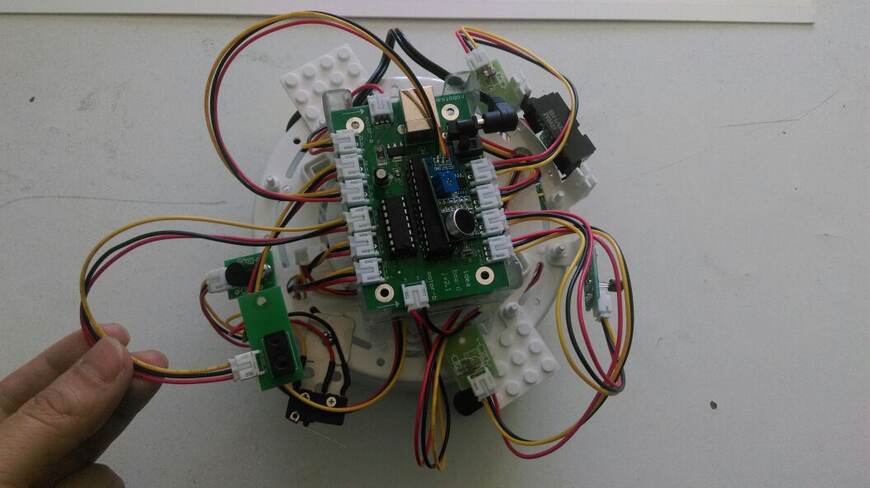
Projemizde robotumuz engel algılayıcı ile sürüş yapıp durma işlemlerini gerçekleştirecek.
Giriş
Bu projemizde robotumuz karşılaştığı engeli takip ederek hareket etmeli, bunun için engel algılayıcı kullanılmalı.
Amacı
Bu projede o- botumuzu kullanarak engel algılayıcı ile sürüş yapma öğrenilmiş olacak.
Yöntem
O-bot’un engel algılayabilmesi için öncelikle modüller kısmında engel algılayıcıyı tanımlamamız gerekiyor. Aşağıdaki resimde modüller kısmını nasıl ayarladığımız yer almaktadır.
Robotumuzu çalıştıran yazılımımız aşağıdaki şekilde yer alıyor. fch dosyası eklenmeli. Yaptığımız akış şemasına göre ilk olarak p6 girişine engel algılayıcı tanımlanmalı. Engel algılandığında robot seti modülünden ileri sürüş, algılanmadığında ise sürüşü durdur işlemleri yapılmalı.


Sonuç ve Tartışma
Robotumuz engel algılayıcı ile engel algıladığında ileri sürüş yapar.Engel algılamadığında ise durmalı. Robot sürüşleri tekrar tekrar denenerek hatalar azaltılır.
Kaynaklar
http://www.robotdevreleri.com/engel-algilayan-robot-2/ bağlantısı incelenerek model alındı. Engel algılama bağlantıları incelendi.
Ekip Tanıtımı
ALFA KURTLAR
ELİF ŞEKER – RABİA ÇOLAK –HASAN EREN KAPLAN- SEMİH EMRE YAMAN- MERTCAN KİPRİ










