



Labirenti Çözen O-bot
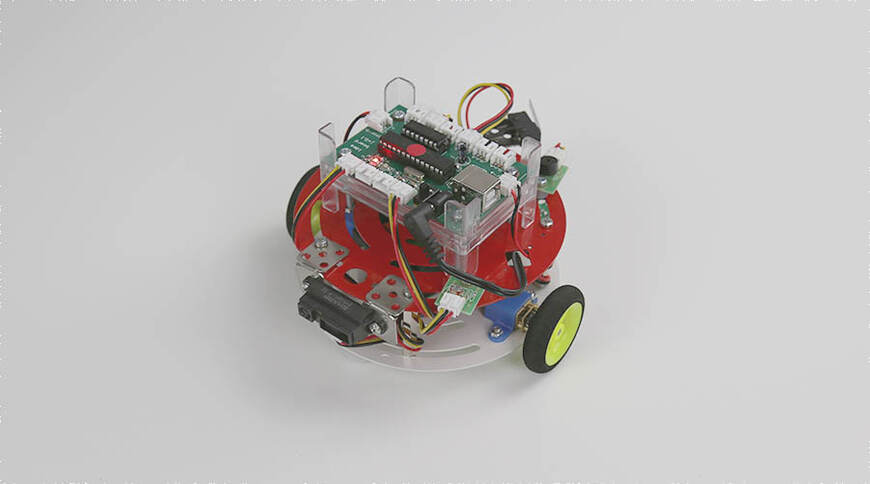
Robotumuz labirentte yönünü bulup labirenti bitiriyor.
Giriş
Robotun üzerinde bulunan mesafe algılayıcısı sayesinde robotun önündeki mesafeye göre yön değiştirdi ve böylece çıkış noktasına ulaştı.
Amacı
Labirentin başlangıç noktasından hareket eden robotun labirent içinde takılmadan ilerleyip çıkış noktasına ulaşmasını sağlamak.
Yöntem
Mesafe algılayıcısına belli değer verip, çizgi algılayıcısını da kullanarak bir akış şeması derledik. Bu değerin altındaki mesafede bir engele yaklaşırsa robotumuz yönünü değiştirdi. Beyaz bir zemin üzerindeki labirentimizin çıkış noktasına siyah çizgi ekledik. Robotumuz siyah çizgiyi görünce durdu.
Sonuç ve Tartışma
Mesafe algılayıcısı ve çizgi algılayıcısı kullanarak geliştirdiğimiz proje, hazırladığımız labirent üzerinde sorunsuz çalıştı
Kaynaklar
bilimgenc.tubitak.gov.tr
Ekip Tanıtımı
İrem Nur Çoruh
Feyza Kaçmaz









