



Trafikte Güvendeyim
•
31/05/2015
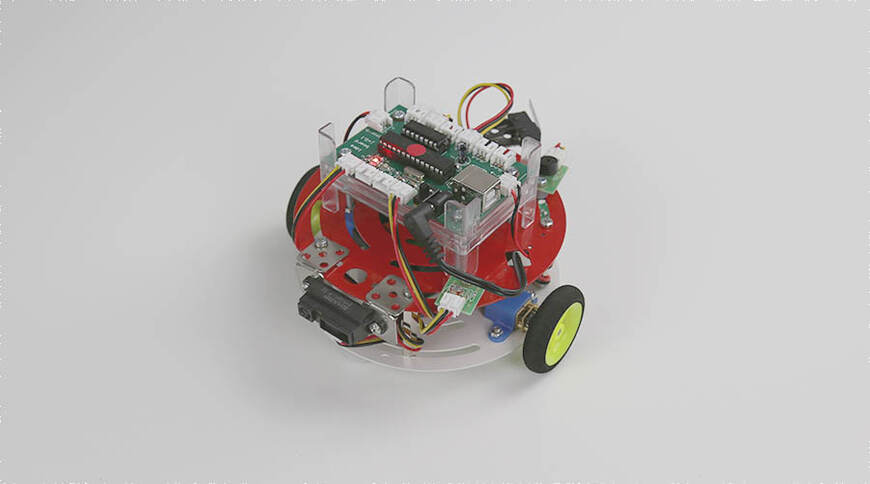
Robotun mesafe algılayıcısını kullanarak hareket halindeki o-botun engel görünce hızının yavaşlamasını sağladık.
Giriş
Robotun mesafe algılayıcısı idea RS yazılımı yardımıyla aktif hale getirildi.
Amacı
Hareket halindeki araçların hızlarını, yaya geçitlerinde karşıdan karşıya geçen insanları görünce otomatik olarak yavaşlatarak yaya geçitlerinde meydana gelen kazaları önlemek
Yöntem
Hareket halindeki O-bot’un, robotta bulunan mesafe algılayıcısıyla karşısına bir engel çıktığında hızının azaltılması sağlandı.
Sonuç ve Tartışma
Mesafe algılayıcı kullanarak robotun hızının yavaşladığını gözlemledik.
Kaynaklar
bilimgenc.tubitak.gov.tr
Ekip Tanıtımı
Nursena İnanoğlu









