



Tutsak Robot
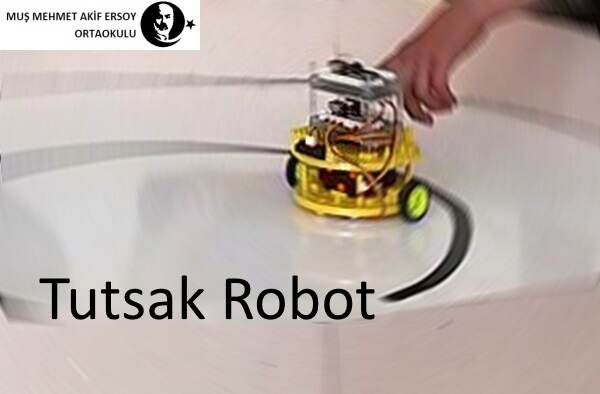
Siyahla çizilmiş alandan kaçmak için mücadele eden ve sonunda bu bölgeden bir güvenlik açığını kullanarak çıkmayı başaran; fakat önüne çıkan duvarları aşamayarak yakalanan robotun hikayesi.
Giriş
Çevreyi algılama ve içinde bulunulan durumun değerlendirilmesi
Amacı
Robotun amacı tutsak olduğu bölgeden kaçmak ileri geri kıvrımlı hareketler yapmak ve bir boşluk bulmaktır.
Yöntem
Robot ileri geri kıvrımlı hareketler yaparak bir boşluk ararken ön arkasında bulunan çizgi algılayıcıları sürekli kontrol eder. Siyah çizgiye geldiğinde yönünü değiştirerek hareketini sürdürür. Bu sayede çember içinde sürekli ileri geri kıvrımlı hareketler yapar. Bu hareketleri sonucu çemberin açık bir bölgesini bulur ve dışarı çıkar. Dışarıda olduğunu anladığı anda - önünde yakın mesafede bir engelin de olmadığını mesafe algılayıcı ile kontrol etmiştir - ses kontrol kartını kullanarak "Kurtuldum!" der. İleri doğru atılır fakat önüne bir duvarın çıktığını farkeder. Birkaç deneme yapar fakat duvarı aşamayarak: "Eyvah! Kaldım yine içeride" der ve orada durur.
Sonuç ve Tartışma
Sonuç olarak çizgi ve mesafe algılayıcılar ile böyle güvenlik uygulamaları geliştirilebilir. Fakat yüksek hızlarda hassasiyet azalmakta, algılama güçlükleri yaşanmaktadır. Bunları göz önüne almakta fayda vardır.
Kaynaklar
www.bilimgenc.tubitak.gov.tr
http://tr.wikipedia.org/wiki/Robotik
Ekip Tanıtımı
Projede çalışma yapan öğrenciler: Sedanur Dinçer, Mine Demir, Meryem Tuğçe Uygur, Halil Yolcu. Danışman Öğretmen: Erhan DADAY / Bilişim Teknolojileri









