
Park Yapan Robot
•
29/05/2015
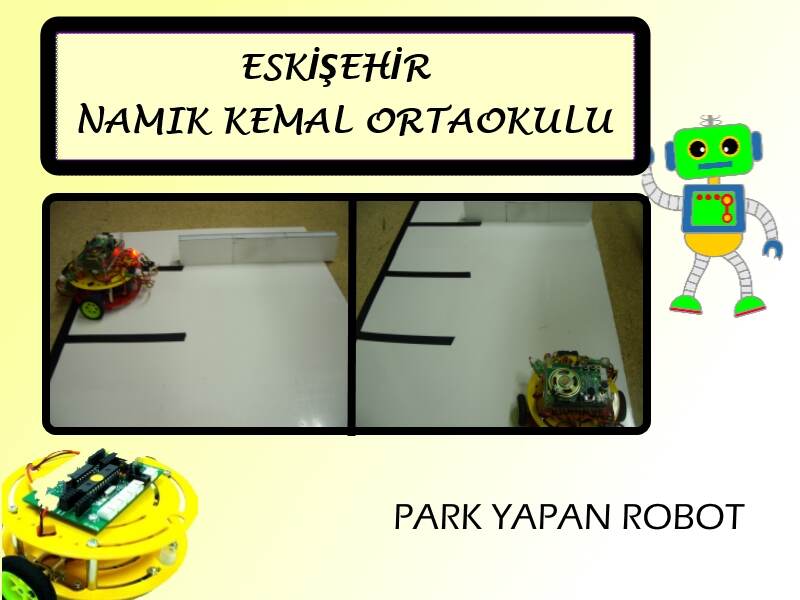
Çizgi ve mesafe algılayıcıları sayesinde otomatik park yapabilen robot.
Giriş
Proje için açık bir otopark hazırlandı. Çizgi algılayıcı, mesafe algılayıcı, harici led bağlantıları yapıldı.
Amacı
O-Bot’un algılayıcıları kullanarak istenilen alanlara park yapabilmesini sağlamak.
Yöntem
Modüller tanımlandı. Robotun engelleri görünce dönmesini sağlamak için mesafe algılayıcı, siyah çizgi üzerinde durması için çizgi algılayıcı kullanıldı. Harici led için altprogram kullanıldı. Algoritma hazırlandı.


Sonuç ve Tartışma
Sonuç olarak harekete başlayan O-Bot önüne engel koyduğumuz bölümde sola döndü, yerleşti ve çizgiyi görünce siren çalıp, harici ledi yaktı.
Kaynaklar
bilimgenc.tubitak.gov.tr
Ekip Tanıtımı