



Lunapark Robot
Projemizde lunaparkta çocukları eğlendiren O-botumuz belirlenen alanda çizgi dışına çıkmadan dolaşmaktadır.
Giriş
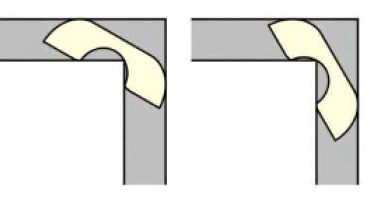
Robotumuz lunaparkta siyah çizgilerle belirlenen alanın dışına çıkmadan dolaşmalıdır. Bir süre sonra durmalıdır.
Amacı
Çizgi dışına çıkmadan hareket edebilen bir robot.
Yöntem
Robotumuzun belirlediğimiz alanda hareketine başlaması ve çizgiyi algıladıktan sonra hareketine devam edebilmesi için bir süre geri gitmesi ve dönmesi gerekiyor. Ne kadar dönmesi ve geri gitmesi gerektiğini deneyerek bulacağız. Robotumuzun belli bir süre sonra durabilmesi için çizgi sayması gerekiyor. Duracağı süreyi sayacağı çizgi sayısını değiştirerek değiştirebiliriz.
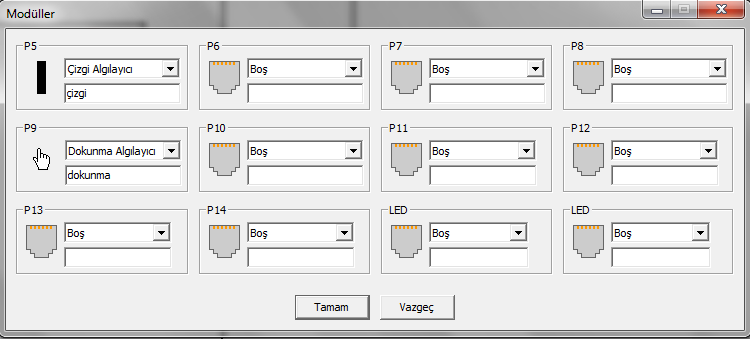
O-bot’a eklediğimiz çizgi algılayıcının ve dokunma algılayıcının çalışabilmesi için öncelikle modüller kısmında tanımlamamız geliyor.
Aşağıdaki resimde modüller kısmını nasıl ayarladığımız yer almaktadır.
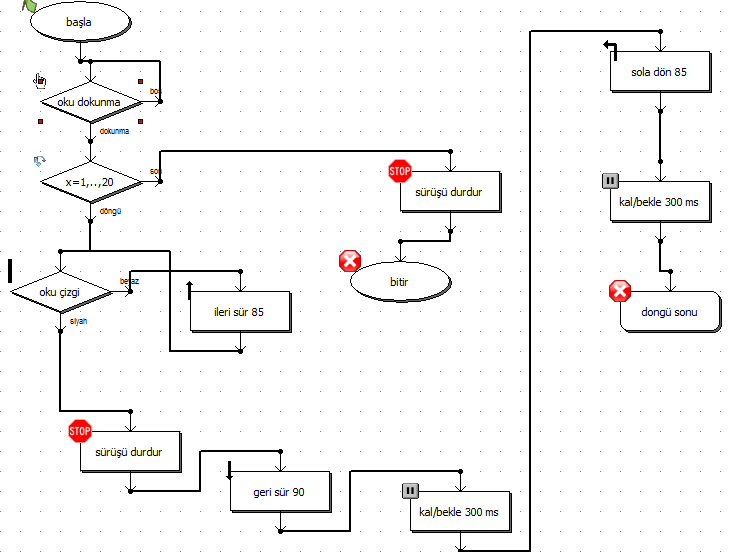
Yaptığımız akış şemasına göre robotumuz dokunma algılayıcıya dokunduğumuzda 85 süratle ileri sürmeye başlıyor. Robotumuzun sayı sayabilmesi için öncelikle for döngüsü oluşturduk. For döngüsünde robotumuz çizgi sayacak. 20 tane çizgi ile karşılaştıktan sonra robot sürüşü durduracak. Robotumuz her çizgi ile karşılaştığında önce 300 ms 90 süratle geri sürecek, sonra 300 ms 85 süratle sola dönecektir. Döngü oluşturduğumuz için robot toplamda 20 çizgiyi tamamlayana kadar aynı işlemleri yapmaya devam edecek. For döngüsünde saydırdığımız çizgi sayısını artırıp azaltarak robotun parkur üzerindeki hareket süresini değiştirebiliriz.
Sonuç ve Tartışma
Sonuç olarak belirlenen çizgiler dışına çıkmadan 20 çizgi görene kadar parkurda hareketine devam eden bir robot elde ettik.
Kaynaklar
Eskişehir Bilim Deney Merkezi
Ekip Tanıtımı