Terziye Yardım
•
26/06/2015
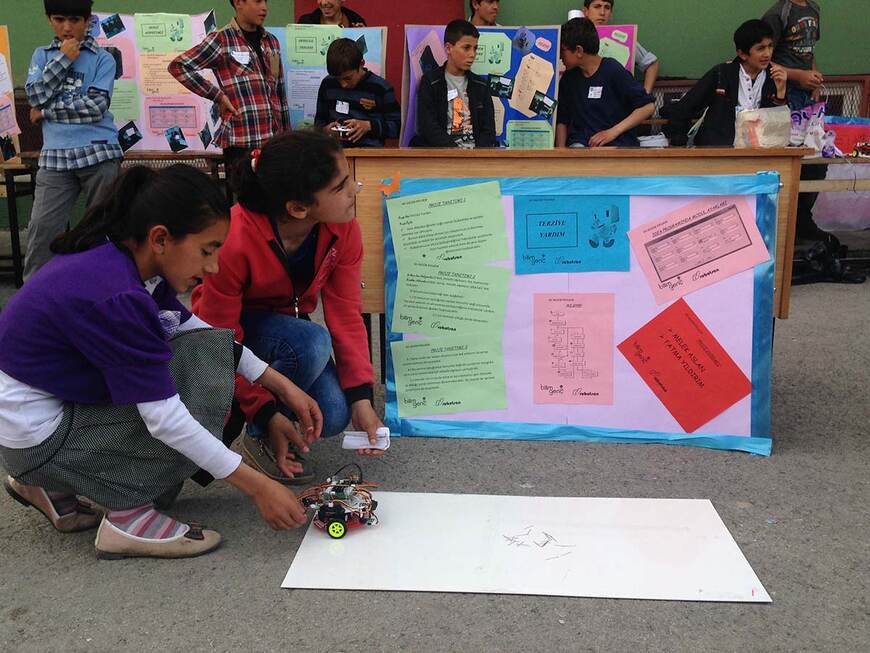
Robotumuzun altına mıknatıs yerleştirerek döngü halinde hareket etmesini sağladık. Bu şekilde yere dökülen iğneleri biz uğraşmadan robotumuz toplayacaktır.
Giriş
Robotumuza mesafe algılayıcısı ve siren yerleştirdik. Bu şekilde etrafa çarpmadan hareket edecek ve iğnelerimizi toplayacaktır. Olduğu yerde dönme hareketi yaptığı için etrafa dağılan iğnelerimizi toplayacaktır.
Amacı
Robotumuz sayesinde yere dökülen iğneleri robot sayesinde toplamak.
Yöntem
Mesafe algılayıcı yerleştirerek duvarlara çarpmadan hareket etmesini sağladık. İleri gidip olduğu yerde dönerek iğneleri toplamayı sağladık.
Sonuç ve Tartışma
Robotumuz ile yere dökülen iğnelerimizi toplayabildik.
Kaynaklar
|
www.bilimgenc.tubitak.gov.tr |
Ekip Tanıtımı
|
Fatma YILDIRIM |
Melek ASLAN
TEKEL TAŞOLUK İMAM HATİP ORTAOKULU - MUŞ -