


Uçan İnsansı Robotlar
İtalya Teknoloji Enstitüsünden (IIT) bir grup araştırmacı, birkaç yıldır uçan insansı robotlar geliştirmek için çalışmalar yapıyor.
Çeşitli görevlerde insanların yerini alabilecek robotlar geliştirmek, uzun yıllardır üzerine çalışmalar yapılan bir alan. Bugüne kadar geliştirilen tüm robotların ortak özelliği, hareket alanlarının insanlar gibi üzerinde bulundukları zeminle sınırlı olması. IIT’den Prof. Dr. Daniele Pucci ve arkadaşları ise 2016’dan beri uçan insansı robotlar geliştirmek için çalışmalar yapıyor.
Pucci, doğal afetler sırasında yararlı olabilecek robotlar geliştirmek amacıyla uçan insansı robotlar üzerine çalışmaya başladıklarını söylüyor. Bugün de doğal afetler sırasında teknolojiden yararlanılıyor. Ancak insanların ulaşamadığı bölgelere havadan ulaşabilecek, enkazın içine girip yürüyebilecek, yangınları söndürebilecek, elektrik şalterlerini veya gaz vanalarını kapatabilecek, molozları kaldırıp yol açabilecek ve alet kullanabilecek robotların geliştirilmesi doğal afetlerle mücadelede çok büyük fark yaratabilir. Bugün insansı robotlar yürümeyi, ellerini ve kollarını kullanarak çeşitli görevler yapmayı zaten iyi kötü başarıyor. Dolayısıyla bu hedefe ulaşılması için aşılması gereken en büyük zorluk, insansı robotlara uçma yeteneği kazandırmak.
Uçan herhangi bir cismin hareketlerini hassas bir biçimde kontrol etmenin yolu, cihaza güç sağlayan motorların/pervanelerin ürettiği itkiyi büyük bir doğrulukla ölçmekten geçer. Bugüne kadar uçan insansı robotlar üzerine yapılan çalışmalar da daha çok bu noktaya odaklanıyor.
İtkiyi doğrudan ölçmek zordur. Genellikte çeşitli sensörler tarafından toplanan veriler kullanılarak tahmin yapılır. Araştırmacılar ise sensörlere ihtiyaç duymadan motorların ürettiği itkiyi tahmin etmek için yeni bir yöntem geliştirmişler. İki ayrı kaynaktan edinilen bilgilerin kullanıldığı yeni yöntem hem tasarımı basitleştiriyor hem de üretim maliyetini düşürüyor.
Geliştirilen yöntemdeki bilgi kaynaklarının ilki, jet motorlarına gönderilen komutlar. Araştırmacılar ilk olarak jet motorlarına gönderilen komutların ortaya çıkardığı sonuçları tespit edebilecekleri bir laboratuvar kurmuşlar. Daha sonra toplanan verileri kullanarak bir model geliştirmişler. Ancak bir motorun komutlara verdiği tepki ortam koşullarına bağlı olarak az da olsa değiştiği için sadece motora gönderilen komutlara dayalı bir sistem, insansı robotu havada kontrol etmek için tek başına yeterli değil. Bu sorunun üstesinden gelmek için ikinci bir bilgi kaynağına ihtiyaç duyuluyor. Robotun havadaki hareketlerinin daha iyi kontrol edilmesine imkân veren bir sistem oluşturmak için robotun kütle merkezi momentumu ile ilgili verilerden de yararlanılıyor.
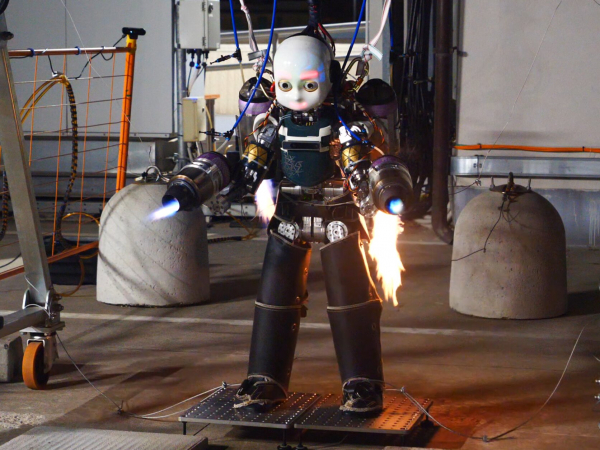
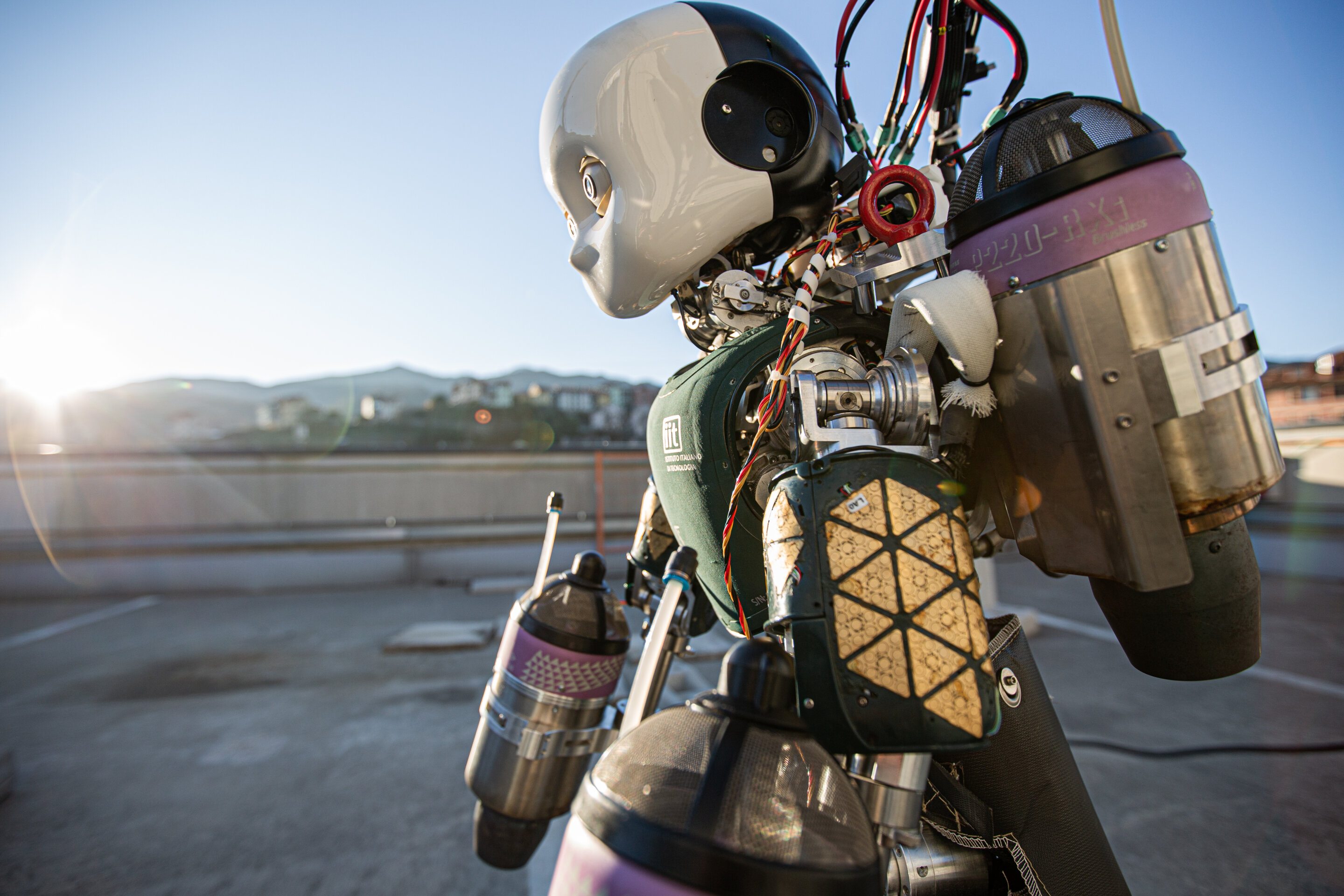
Araştırmacılar geliştirdikleri sistemi, yine kendi geliştirdikleri dört jet motorlu bir robotta başarıyla test etmişler. Jet motorlarından çıkan, sıcaklığı 700 °C’a ve hızı saatte 1.800 kilometreye ulaşan hava akıntısı ile baş edebilmek için özel güvenlik önlemleri alınması gerekmiş.

Uçan insansı robotların günlük hayatta kendine yer bulması için gelecekte de çalışmalar yapılması gerekiyor. Araştırmacılar ilk olarak geliştirdikleri robotu kablolardan arındırmayı ve herhangi bir yere bağlı olmaksızın çalışır hâle getirmeyi planlıyorlar. Ayrıca akışkanlar dinamiği modellerinin de robotun uçuş kontrol sistemlerine entegre edilmesi için çalışmalar yapılıyor. Araştırmacılar geliştirdikleri itki kontrol sistemini yapay zekâ yardımıyla güçlendirmeyi de planlıyorlar.