




Deniz Üzerindeki Katı Atıkları Toplayan Akıllı Robot Yazılımının Geliştirilmesi
Deniz üzerindeki katı atıkları toplamak için görüntü işleme yöntemini kullanarak gerçekleştirdiğimiz projemiz; karada hareket ettirilen robotların dışında denizde de etkin şekilde robot kullanımını yaygınlaştırmayı hedeflediği için benzeri projelerden farklılık içermektedir. İnsan sayısının artmasına bağlı olarak çevre bilincinin insanımıza ve ülkemize aşılanabilmesi adına büyük bir adım olduğuna inanmaktayız. Robota daha fazla fonksiyon ekleyerek sanayide ve özel sektörde kullanımı yaygınlaştırmayı hedefliyoruz.
Giriş
Bu projede; deniz kenarları, göller, havuzlar, göletler, barajlar üzerinde var olan katı atıkları görüntü işleme (openCV görüntü işleme kütüphanesi [3], CAMshift Teori, Gauss Filtresi[4]) kullanılarak toplamak hedeflenmektedir. Bir kamera yardımı ile dışarıdan hiçbir müdahale olmadan deniz üzerindeki hareketli katı maddenin yeri tespit edilerek, tespit edilen katı maddenin görüntüsü alınıp, ilgili algoritma (hedef takip sistemi) ile robotun katı maddeye yönlenmesi sağlanacaktır.
Daha sonra robotun önünde yer alan paletli döner kılavuz bant aracılığı ile ilgili katı cisim; robotun katı madde toplama haznesinde alınacaktır.
Görüntüden gelen bilgi doğrultusunda kamera, o bölgeye servo motorlar (x ve y ekseni) yardımı ile çevrilerek; bölgedeki katı maddenin görüntüsünü ilgili algoritmaya gönderecek ve katı maddenin algoritma da belirlenen boyutların üzerinde olması halinde (40cm ye kadar genişliği olan cisimlere yönlenmesi sağlanacaktır), robotun o bölgeye yönlenmesinin önüne geçilecektir.
Robotun istenilen bölgeye yönlenebilmesi için güçlü bir servo yardımı ile arka kısımda bir kanatçık hareket ettirilerek robota yön verilecektir (arka kanatçık servo gücü 1 cm2'ye 40 kg uygulayabiliyor).
Kameradan alınan görüntü; cisim ile robotun arasındaki mesafenin uzaklık fonksiyonu ile ölçekli olarak büyütülmesi sonucunda, ilgili katı cismin gerçek görüntüsü ve hacmini belirlememizi sağlayarak robotun belirli boyutların (40cm ye kadar genişliği olan cisimler) dışındaki katı cisimlere yönlenmemesi sağlanacaktır.
Yazılan algoritmaya göre robot; alınan görüntüden gelen bilgi doğrultusunda, katı maddenin robotun haznesine alınabilir kararını verdikten sonra, kameranın ilgili katı maddeyi izlemesi program aracılığı(openCV görüntü işleme kütüphanesi, CAMshift Teori, Gauss Filtresi) ile sağlanacak ve arka kısımdaki kanatçığı hareket ettiren servo motor vasıtası ile de katı maddeye robotun yönlenmesi sağlanacaktır.
Bu projede amaç; sadece denizde üzerindeki katı cisimleri toplamak değil, insanların denizi kirlettiklerinin farkına varmalarını sağlamaktır. Aynı zamanda optimum maliyetle deniz üzerindeki çöplerin toplanması ve deniz üzerindeki çöplerin çevreye verdiği zararın en aza indirilmesini sağlamak bu projenin asıl amacıdır. Bu çalışmanın yenilikçi yönü ise benzerlerinden farklı olarak denizdeki katı cisimleri toplaması, görüntü ve çevre kirliliğinin önüne geçmeyi hedeflemesidir.
Amacı
Bu proje ile deniz üzerinde var olan katı maddelerin çevre ve görüntü kirliliğine yol açmasını önlemek için yeni bir tasarım olan deniz üzerindeki katı maddeleri toplayan akıllı robotu geliştirdik. Benzerlerinden farklı olarak robotumuz deniz üzerinde hareket edecek ve deniz üzerinde var olan katı maddeleri haznesine toplayarak insanlar ve çevre üzerinde olumlu bir etki bırakacaktır. Ayrıca denize kenarı olan büyük şehirlerimizde var olan deniz kirliliğinin önüne geçerek; ilgili şehirlerimizin saygınlık kazanmasına büyük destek verecek örnek bir uygulama niteliği taşımaktadır.
Yöntem
Deniz üzerindeki katı atıkları toplayan akıllı robotumuzun tüm yazılım ve donanımlarını tamamlayarak bir prototip akıllı robot projemizi tamamladık.
İlk olarak görüntü işleme için gerekli olan görüntü işleme kütüphanesini bilgisayarımıza ekledik.
Bir kamera yardımı ile görüntüyü alıp işlenmesi için openCV görüntü işleme kütüphanesinin alt programlarını genişleterek kameradan gelen görüntü doğrultusunda Arduino-Mega(Atmega-2560) aracılığı ile kamerayı hareket ettiren servo motorların görüntünün geldiği yöne doğru yönelmesini sağladık.
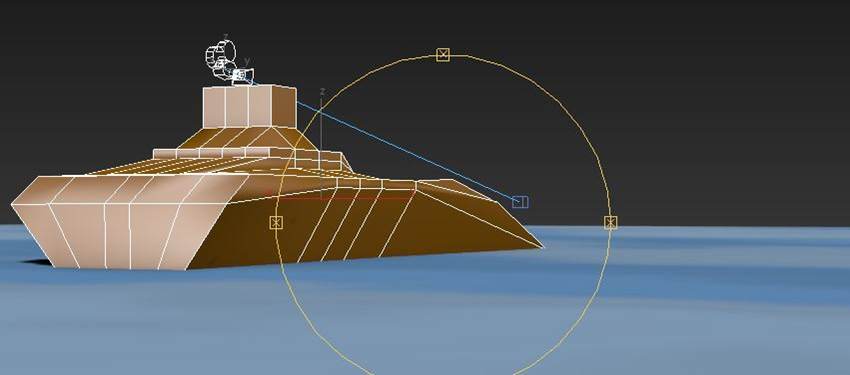
Robotun su üzerinde durabilmesi için gemi şeklinde bir ana gövdenin tasarımını gerçekleştirdik.
Robotun su üzerinde yol alabilmesi için ana gövdenin arka kısmının sağ ve sol taraflarına iki adet dc motor ekledik ve bu motorların uçlarına pervaneleri ekleyerek su itiş gücü sağladık.
Robotun katı atıkları haznesine alabilmesi için robotun ön kısmına kılavuz bant ekledik ve bir adet redüktörlü dc motor ile döner kılavuz bantı hareket ettirdik.
Ana gövde içerisine bütün elektrik ve elektronik sistemler gömülecek şekilde bir hazne tasarladık. Donanımın bulunduğu haznenin boyutları: Yükseklik: 42cm, genişlik :40cm, en: 50 cm.
Bu hazne içerisine PC dahil tüm elektronik donanımları yerleştirdik.
Sonuç ve Tartışma
Deniz Üzerindeki Katı Atıkları Toplayan Akıllı Robot Yazılımının Geliştirilmesi
Elektrik-Elektronik- Yazılım
Hızı bilinmeyen bir kamera yardımı ile görüntü işleme yöntemi kullanılarak su üzerinde var olan nesnelerin otonom olarak su üzerinden temizlenmesi için yazılımın geliştirilmesini sağladık.
Bu proje robot tıpkı nesne takip eden programlar gibi nesnenin yerini belirliyor ve nesnenin koordinatlarına doğru ilerleyerek nesnenin su üzerinden temizlenmesi için kendisi karar alıyor.
Robotun sahip olduğu yazılım sayesinde; çöp toplama haznesi genişliğinden daha büyük cisimleri veya canlı varlıkları ayırt eden özel görüntü işleme kütüphanesi aracılığı ile sadece su üzerinde var olan atıkları ayırt ederek robotun çöp toplama haznesine atıkları alması sağlanmıştır.
Güneşli, yağmurlu, az bulutlu günlerde yapılan deneylerde yazılımın başarı oranı %96 oranında tamamlanmıştır.
Projemiz ticarileşme aşamasında olup, proje ile ilgilenen iş adamlarımızdan gerekli duyarlılığı göstermeleri beklenmektedir.
Kaynaklar
- An Efficient Moving Target Tracking Strategy Based on OpenCV and CAMShift Theory, Springer
- A Practical Introduction to Computer Vision with OpenCV (Wiley-IS&T Series in Imaging Science and Technology), K. Davson
- Multiple Target Tracking in World Coordinatewith Single, Minimally Calibrated Camera, Springer
- Shape Analysis and Classification theory & practical, pages Luciano da Fontoura and R.Marcondes, pages 302-322, Digital Image Processing Second Edition, Rafael C. Gonzalez University of Tennessee, pg: 30-140
Ekip Tanıtımı
Mustafa EROL
Hasan Hüseyin SOLAK
Oguzhan YILDIRIM









